Project
鼓形(グロボイド)ウォームギヤ・減速機の導入事例:
EasternGear独自の技術力で開発した多様な製品実績をご紹介します。
5軸ロボットアーム開発

✔️グロボイドウォームギア(鼓形ウォームギア)を適用したロボット減速機及びロボットアームの開発
先端産業市場において、大企業や主要国による技術の偏重と独占販売の継続的な問題を解決するため、イースタンギアはロボットの関節部に欠かせないロボット減速機の開発を進めてきました。
最近まで、ロボット減速機の大部分はハーモニックドライブやRV減速機が占めていましたが、近年、ロボット構造の多様化に伴い、より軽量でシンプルな構造でありながら精密な制御が可能なロボット減速機への需要が高まっています。
弊社イースタンギア研究所は、このような市場の流れを反映し、従来の汎用ウォーム減速機ではなく、グロボイドウォームギア(鼓形ウォームギア)技術を適用した新しいロボット減速機を開発しました。
本プロジェクトでは、既存の同等仕様の製品と比べ、原価削減及び可搬重量の向上を実現した革新的なロボット減速機を搭載したロボットアームの開発に成功し、鼓形ウォームギア減速機の性能を証明する優れた事例となりました。
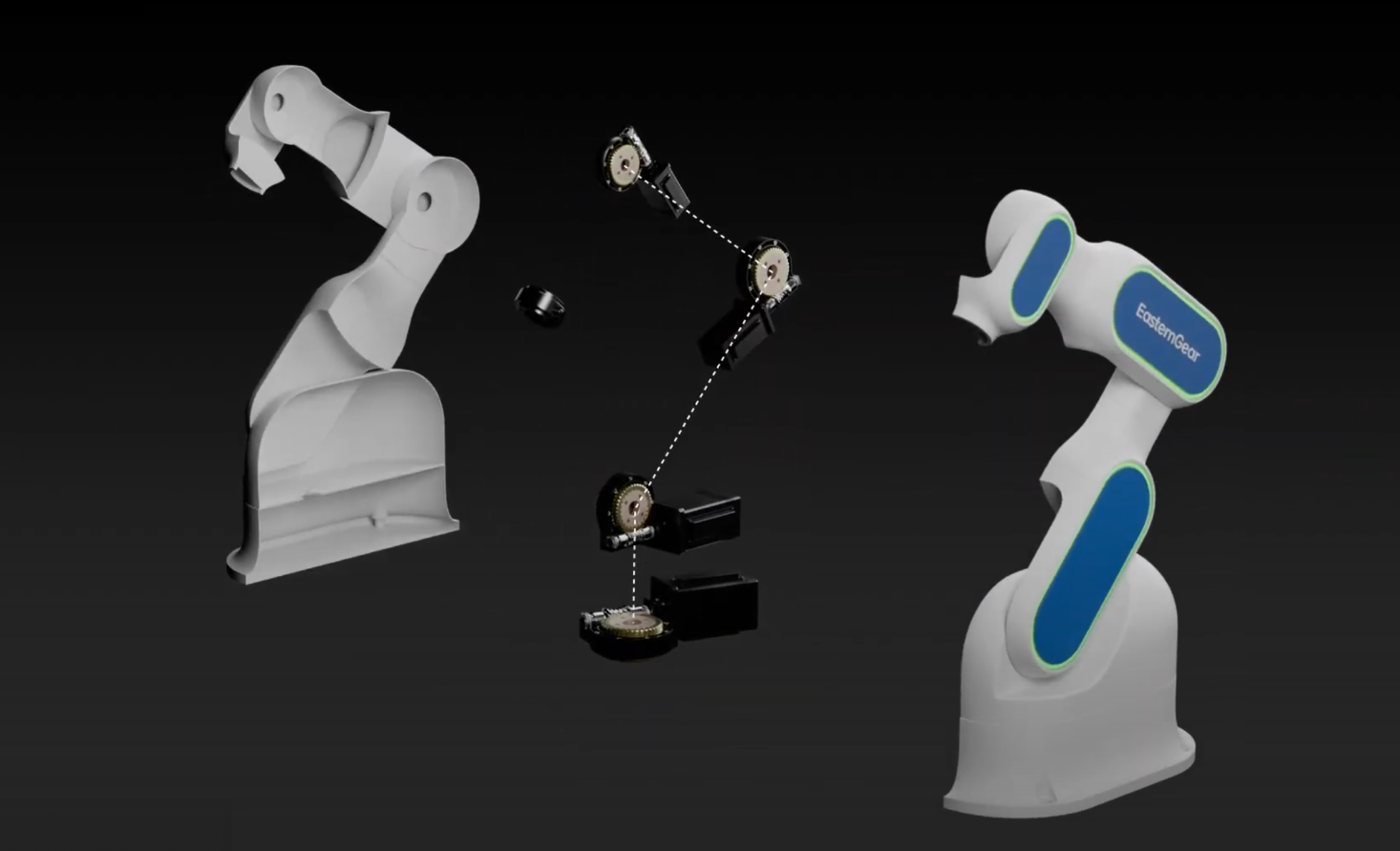
✔️イースタンギアの5軸多関節ロボットアームの特徴
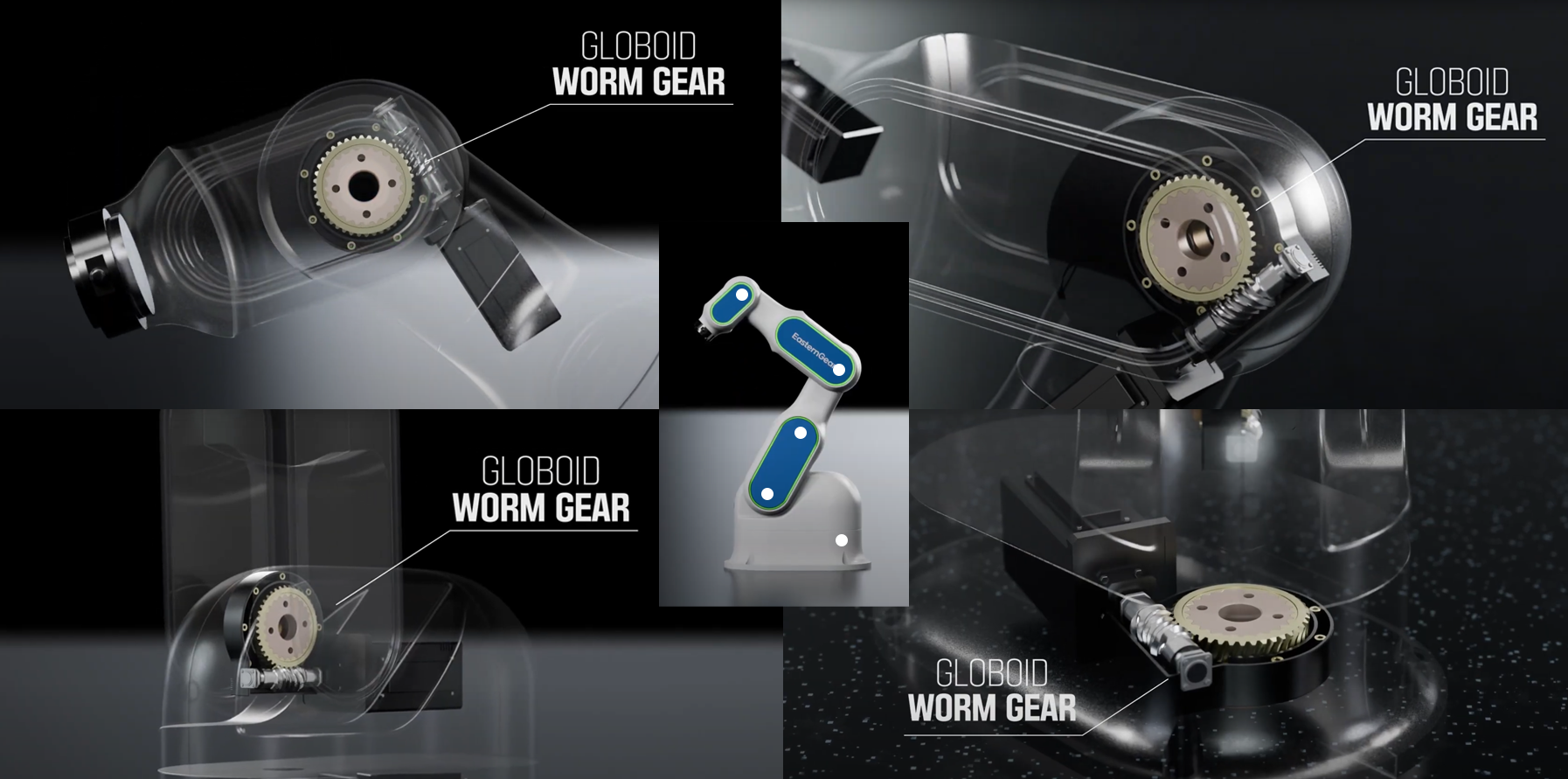
イースタンギアの5軸多関節ロボットアームは、各関節にギアを搭載することで、より高い最大トルクを実現し、精度と正確性を向上させています。このロボットアームはベースから先端まで各関節にグロボイド(鼓形)ウォームギアを使用しています。
グロボイドウォームギアの特長の一つは、セルフロック機能(バックドライブ防止)を備えており、保安性と安全性を高めることができます。この多関節ロボットアームの作業範囲は**1400mm(55.18インチ)であり、最大で20kg(44ポンド)**の荷重を取り扱うことが可能です。
以下は実際の5軸多関節ロボットアームの動作映像です。
✔️SPEC
| 항목 | 스펙 |
| 制御軸(軸数) | 5軸多関節 |
| 可搬重量 (kg) |
20kg 以上 |
| 動作半径 (mm) | 1400mm |
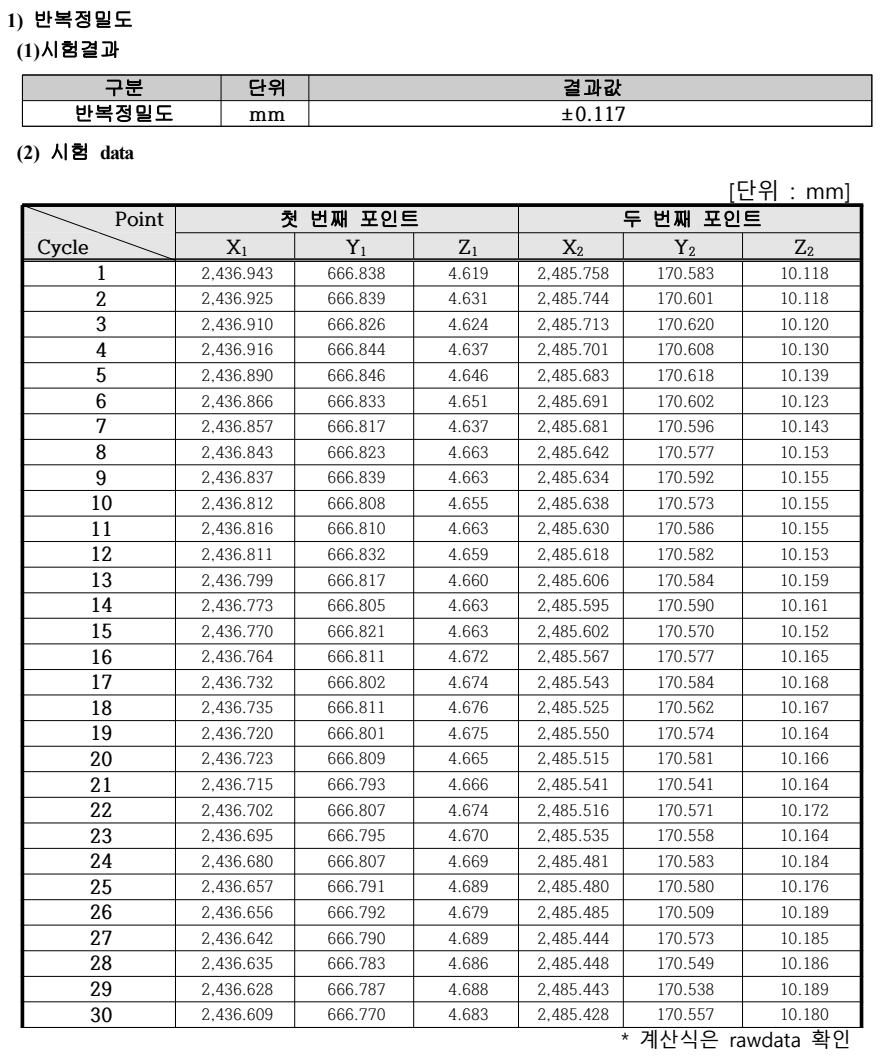
| 繰り返し精度 (mm) | ±0.12mm |
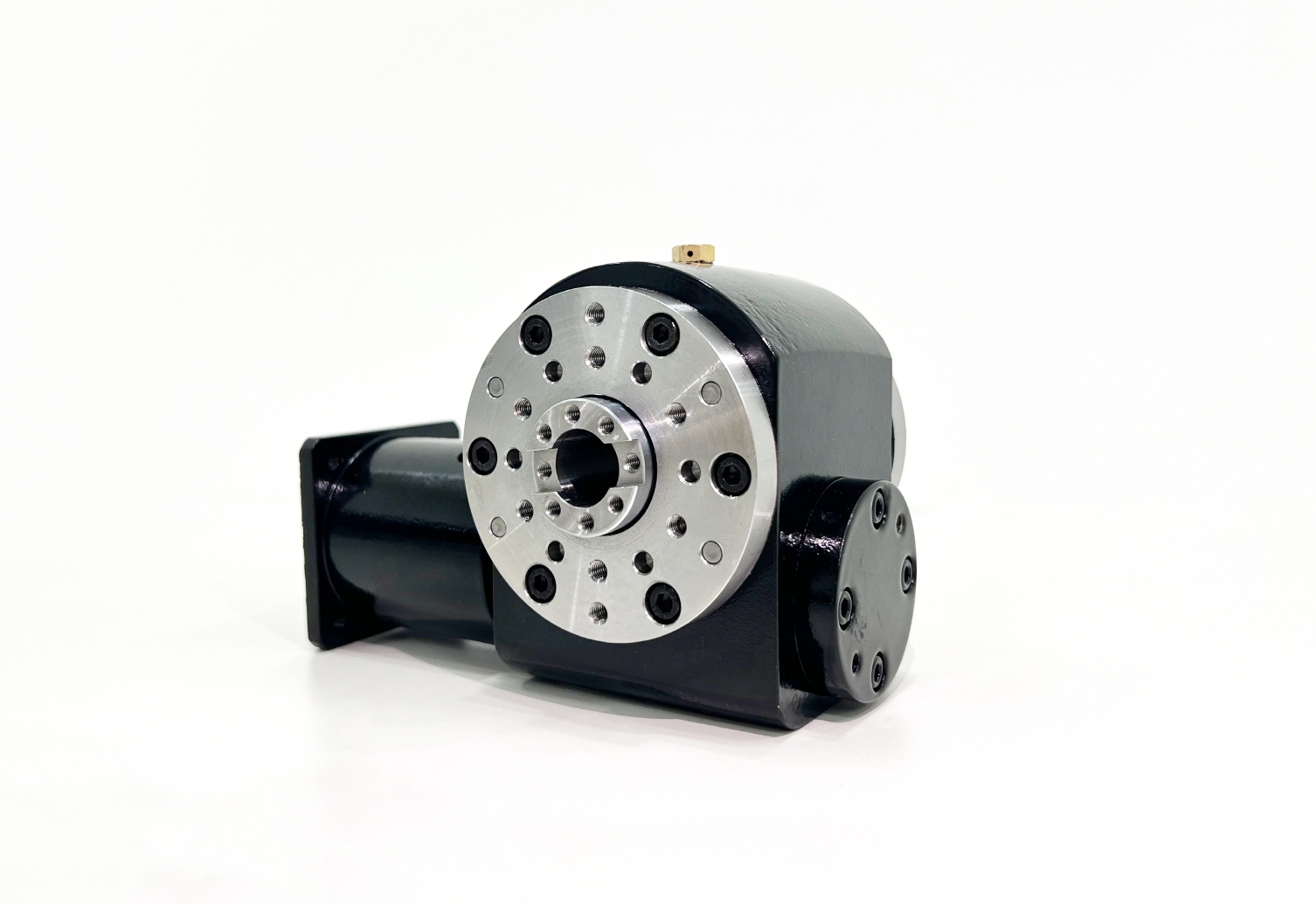
✔️ロボット減速機
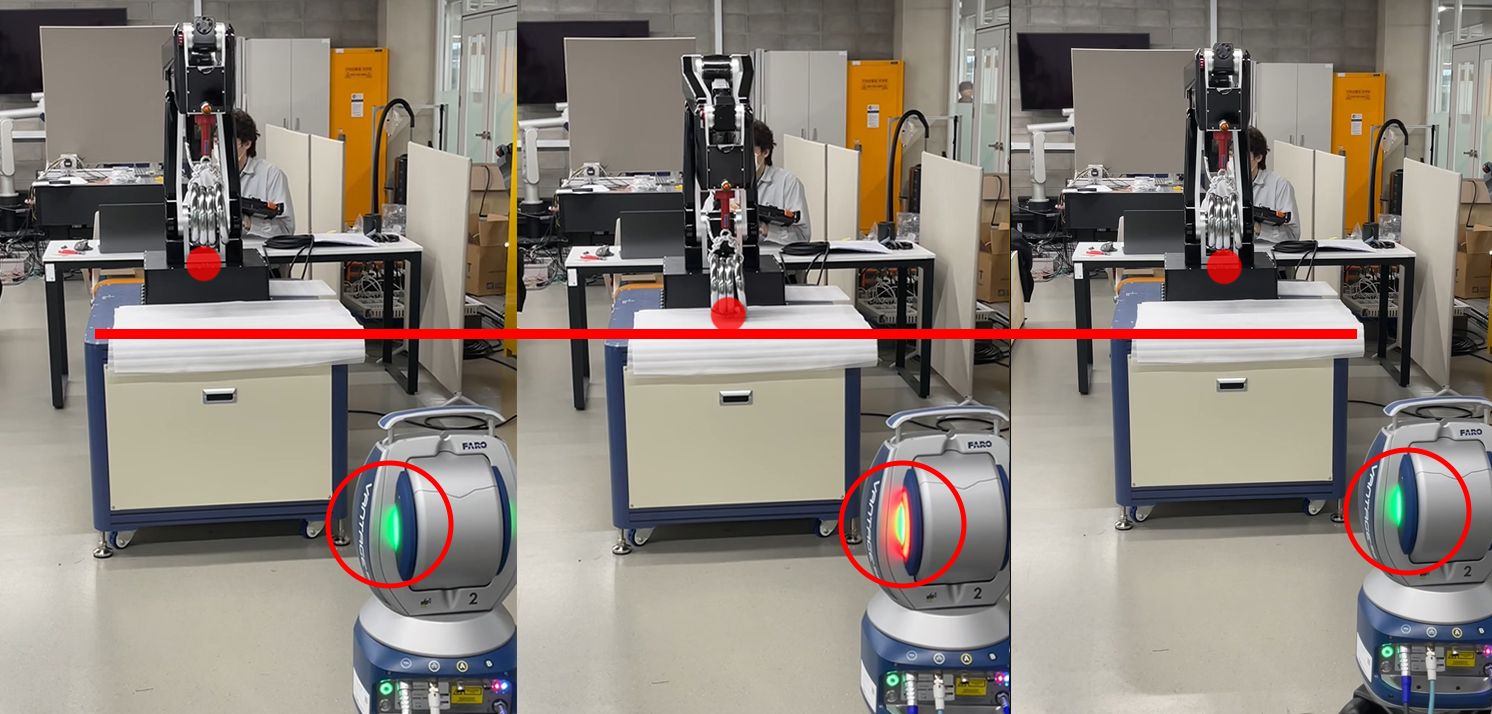
✔️ロボットアーム繰り返し精度試験
これは韓国ロボット融合研究院(KIRO)が実施した繰り返し精度および可搬重量のテストです。試験手順と結果は以下の通りです。
[試験手順]
-
繰り返し精度
-
エンドエフェクタにSMR測定センサーを取り付ける。
-
レーザートラッカーを使用し、ロボット産業規格 KS B ISO 9283:2011 に基づき指定されたポイントを30回往復運動した際の繰り返し精度を測定。
-
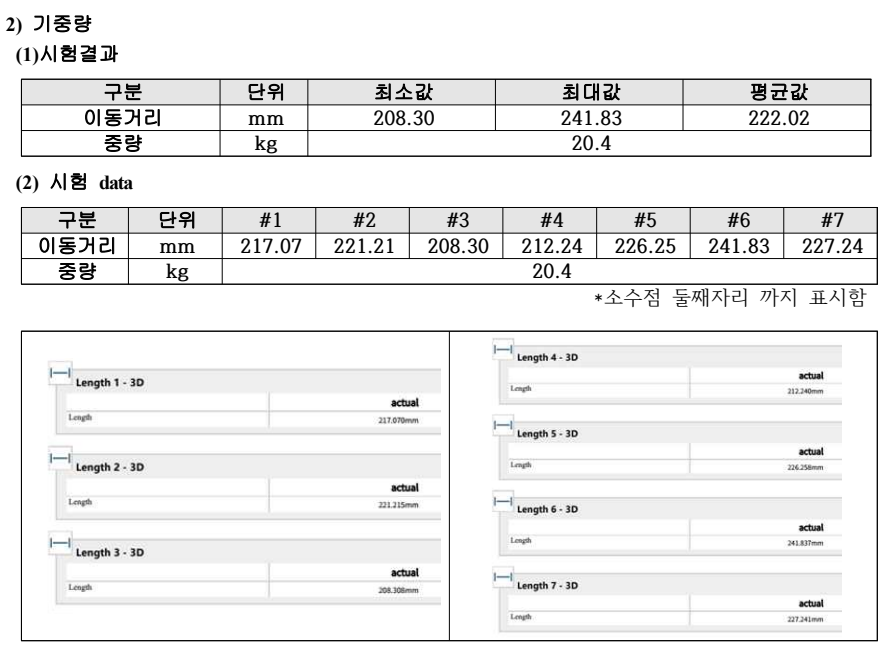
可搬重量
-
秤を用いて負荷用の重りの重量を確認する。
-
重量確認済みの負荷用重りをロボットのエンドエフェクタに取り付ける。
-
レーザートラッカーを用いてロボットの移動距離を測定する。
[試験結果]
✔️その他条件テスト
